리눅스 에서 부팅 시 원하는 ROS 프로그램을 자동으로 실행하는 방법
by injae Kim
리눅스 에서 부팅 시 원하는 ROS 프로그램을 자동으로 실행하는 방법
ROS 는 다양한 운영체제와 디바이스 상 에서의 작동을 지원하기 때문에, ROS 프로그램 또한 다양한 상황과 여러가지 목적을 가지고 개발됩니다.
 |
|---|
| Nvidia 사의 Jetson Nano 보드 출처: Nvidia 공식 홈페이지 |
일반적인 데스크탑 에서 작동되는 프로그램이 아닌 위의 사진과 같은 임베디드 보드 (Nvidia Jetson Nano) 나 로봇 등 에서 작동하는 프로그램을 개발해야 할 때 ROS 는 다양한 운영체제와 기기를 지원하므로 유용하게 사용할 수 있습니다.
저의 경우 소형 로봇 내에 Jetson Nano 를 탑재하며 로봇의 영상처리와 서버와의 데이터 송수신 기능을 ROS 기반의 프로그램으로 개발했던 경험이 있습니다.
이 때 ROS 는 Window, Linux, Mac 등의 운영체제와 Jetson Nano등의 소형 보드, 데스크탑, 랩탑 등 다양한 기기들을 모두 잘 지원하므로 직접 통신 관련 기능을 개발하거나 운영체제 별 세팅을 하지 않아도 ROS 기반의 프로그램을 바로 작성할 수 있다는 장점이 있었습니다.
이렇게 로봇 등에 탑재되는 Jetson Nano와 같은 소형 보드에서 작동하는 ROS 프로그램은 부팅시 프로그래머가 원하는 ROS 프로그램이 자동으로 실행되어야 하는 경우가 자주 발생합니다.
그 이유는, ROS 프로그램이 작동해야 하는 상황이 모니터를 사용할 수 없거나 로봇등의 완제품 내부에 탑재되기 떄문입니다!
 |
|---|
| Boston dynamics 사의 2족, 4족 보행 로봇 출처: Boston dynamics 공식 홈페이지 |
위와같은 로봇에 탑재되어 실행되는 ROS 프로그램은 일반적인 SW 와 달리 모니터가 없는 상황이죠. 따라서 부팅 시 바로 프로그래머가 지정한 ROS 프로그램이 실행되어야 합니다.
이 글에선 리눅스 에서 부팅 시 프로그래머가 원하는 ROS 프로그램을 실행하는 방법에 대해 알아보겠습니다.
리눅스 부팅과정과 시작 프로세스
리눅스 부팅과정을 간단하게 살펴보면 부트로더의 OS 로드, 커널 로드 단계를 거치게 됩니다.
이후 커널로드가 완료되면 프로세스들을 실행하고 관리하기 위한 Process ID 가 1인 Init 프로세스가 실행됩니다.
리눅스 기반의 여러 배포판 들에선 init 이라는 이름의 init 시스템을 통해 Init 프로세스를 실행하였는데요, 2015년을 기준으로 여러 리눅스 배포판들이 init을 버리고 systemd 라는 init 시스템을 기본 init 시스템으로 채택하게 되었습니다.
init 에서 systemd 로 init 시스템이 2015년에 전환된 후 systemd 기반으로 부팅시 원하는 ROS 프로그램을 실행하는 방법에 대한 자료가 많이 없어서, 직접 글을 작성하게 되었습니다.
따라서 이 systemd 를 활용하여 우리가 원하는 ROS 프로그램을 커널로드 후 자동으로 실행시켜 보도록 하겠습니다!
이 글에서 사용한 리눅스는 Ubuntu 16.04 LTS 버전입니다. 2015 년 전에 릴리즈 된 리눅스 배포판의 경우 init 시스템을 systemd 대신 그대로 사용하고 있는 경우도 있으므로 설치된 리눅스 배포판의 버전과 릴리즈 시점을 확인하시기 바랍니다.
리눅스의 Init 시스템 의 역사와 변화 과정
리눅스가 부팅되면서 커널이 로드된 후에는, 여러 프로세스들을 관리하기 위한 Process ID 가 1인 Init 프로세스가 실행됩니다.
리눅스에서 ps -ef 명령어로 현재 실행중인 Process 들의 ID 와 PID = 1 인 init 프로세스를 확인할 수 있습니다.
$ ps -ef
UID PID PPID CMD
root 1 0 init
root 2 0 [kthreadd]
root 3 2 [migration/0]
...
이러한 init 프로세스는 추후에 실행되는 프로세스를 관리하고, 종료시 할당된 자원을 회수하는 등의 중요한 기능을 담당하게 됩니다.
2015년 전 까지는 리눅스 배포판 들 에서 init 프로세스로 init 이라는 이름의 시스템을 사용하고 있었는데요, 2015년 이후 init 시스템이 systemd 라는 이름의 시스템으로 대체되게 됩니다.
기존의 init 시스템은 개발된 지 오래되었기도 하고, 여러 단점들을 가지고 있었습니다.
가장 큰 단점은, 부팅 시 병렬 처리를 지원하지 않는다는 것 이였습니다.
CPU 가 발전하면서, 멀티코어 CPU 가 대부분의 PC 에 장착되게 되었지만, 기존의 init 시스템은 부팅 시 에 이러한 멀티코어에서 처리할 수 있는 병렬성을 완전히 활용하지 못하고 있었습니다.
따라서, 병럴처리를 지원하고 기존의 init 시스템을 개선한 systemd 가 등장하게 되었습니다.
systemd 의 중요 특징을 간단하게 나열해보면 다음과 같습니다.
- 전체적인 시스템 구조의 개선
- 더 간단한 부팅 프로세스
- 부팅시의 병렬 처리 지원
이 링크 에서 init 과 systemd 의 차이점과 특징을 조금 더 자세히 살펴볼 수 있습니다.
Systemd 를 사용한 부팅 시 프로그램 자동 실행 등록 방법
systemd 는 오픈소스로 개발되고 있으며 이 깃 저장소 링크 에서 코드를 확인할 수 있습니다.
systemd 에 대한 공식문서 나 위키 를 참고하시면 더 자세한 설명과 API 등을 확인할 수 있습니다.
systemd 에 부팅시 원하는 프로그램을 실행하도록 등록하는 방법은 다음과 같습니다.
Systemd 에 부팅시 자동실행할 프로그램에 대한 실행 스크립트 작성
/etc/systemd/system/ 경로에 자동 실행할 프로그램에 대한 실행 스크립트를 작성해 줍니다.
이때 실행 스크립트는 .service 확장자로 지정해주면 됩니다.
저의 경우 부팅 시 systemd 가 /home/sheco/injae.sh 스크립트를 실행하기를 원하는 상황이므로 다음과같은 service 파일을 작성해줍니다.
# /etc/systemd/system/ros_init.service
[Unit]
Description=Ros Init Daemon
[Service]
Type=simple
ExecStart=/home/sheco/injae.sh # 부팅 시 실행하고 싶은 스크립트의 경로
[Install]
WantedBy=multi-user.target
systemd 가 부팅 시 실행할 .service 파일은 크게 Unit, Service, Install 로 구성되는데 각각의 항목에는 여러 옵션들을 추가할 수 있습니다.
# service 파일의 다양한 옵션들 예시
[Unit]
Description=Ros Init Daemon # 추후 서비스 상태 확인 시 서비스 설명란에 출력됨
Requires=*.service # 이 서비스를 실행하기 위해 필요한 서비스 의존성
Before=*.service # 이 서비스 실행 후에 실행되어야 할 서비스
After=*.service # 이 서비스 실행 전에 실행되어야 할 서비스
[Service]
Type=simple # simple, forking, oneshot, notify, dbus 등 프로그램의 타입 명시를 원하는 경우
ExecStart=/home/sheco/injae.sh # 부팅 시 실행하고 싶은 스크립트의 경로
[Install]
WantedBy=multi-user.target
[Unit] 의 Before, After 를 잘 사용하면 다수의 서비스들 끼리 원하는 순서대로 실행되도록 조정할 수 있습니다.
실행할 ROS 프로그램 관련 스크립트 작성
systemd 에 등록한 ros_init.service 에서 실행할 파일을 ExecStart=/home/sheco/injae.sh 로 정해주었으므로, 해당경로에 해당이름의 스크립트 파일을 생성해 줍니다.
스크립트 파일의 내용은 일반적으로 ros 프로그램을 실행할 때 사용자가 터미널에 작성하는 내용과 일치합니다.
#! /bin/bash
# 실행하고자 하는 ros 버전에 맞는 setup.bash 실행
source /opt/ros/melodic/setup.bash
source home/sheco/catkin_ws/devel/setup.bash
# ros 실행해 필요한 마스터, 호스트 노드 IP 주소 설정
export ROS_MASTER_URI=http://10.42.0.1:11311
export ROS_HOSTNAME=10.42.0.1
# roscore 실행
sleep 3
cd /home/sheco/catkin_ws
roscore
# 원하는 ros 노드 실행, 이때 rosrun ros_node & 로 background 로 실행시켜야 함
sleep 5
rosrun opencv opencv_publish_node &
ros 실행 시 설치되어 있는 버전에 맞는 setup.bash 를 먼저 실행해주어야 합니다. 저는 ros melodic 버전을 사용하였습니다.
그 후 ros 실행에 필요한 마스터, 호스트 노드의 IP 주소를 미리 확인하여 export 해주어야 합니다.
저는 이때 일반 와이파이가 아닌 Jetson Nano 보드의 자체 핫스팟을 사용하였으므로 핫스팟의 IP 주소인 10.42.0.1 로 IP 주소를 설정해주었습니다.
핫스팟이 아닌 공용 와이파이를 사용한다면 IP 동적할당 등 으로 부팅 시 마다 IP 주소가 바뀔수 도 있으니, 이런 상황에는 자신의 IP 주소를 받아오는 처리를 추가적으로 해주어야 합니다.
그 후 roscore 를 실행한 후, 잠시 기다린 후에 미리 컴파일 해 둔 ros 프로그램을 실행시킵니다.
이떄 주의할 점은, rosrun ros_node & 로 & 를 사용하여 background 로 ros 프로그램을 실행시켜 주어야 터미널이 종료되도 ros 프로그램이 계속 실행되게 됩니다.
Systemd 에 작성한 자동 실행 service 파일 등록
거의 다 왔습니다! 여기까지 우리는 systemd 에 자동실행 service 파일과 실행시키고자 하는 ros프로그램의 자동실행 스크립트 를 작성하였습니다.
남은건 systemd 에 부팅시 자동실행할 service 파일을 등록하는 것 입니다.
터미널을 실행시켜 다음 명령어를 통해 systemd 에 작성한 service 파일을 등록시켜 줍시다.
systemctl daemon-reload
systemctl enable ros_init.service # 부팅시 이 서비스를 자동시작 함
systemctl start ros_init.service # 서비스 시작
systemctl 명령어를 통해 systemd 에 원하는 serivce 를 등록하거나 상태를 확인하는 등의 다양한 기능을 사용할 수 있습니다.
systemctl status service_name.service # 서비스 상태 확인
systemctl start service_name.service # 서비스 시작
systemctl restart service_name.service # 서비스 재시작
systemctl stop service_name.service # 서비스 중지
systemctl enable service_name.service # 부팅시 이 서비스 자동 실행
systemctl disable service_name.service # 부팅시 이 서비스 자동 실행 해제
systemctl list-units --type=service # 실행중인 서비스 목록 확인
systemctl list-units --type=service 로 현재 실행중인 서비스 목록을 확인하거나 내가 등록한 서비스가 잘 실행되고 있는지, 실행이 실패했다면 그 이유가 무엇인지를 로그를 통해 확인할 수 있습니다.
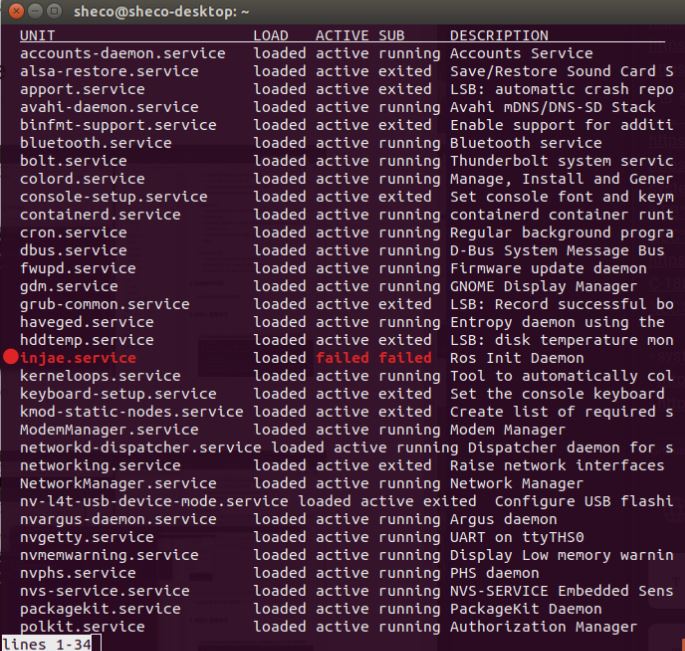
위의 사진처럼 제가 작성한 서비스 파일이 부팅 시 자동실행 되도록 등록되어 있는것을 확인할 수 있습니다.
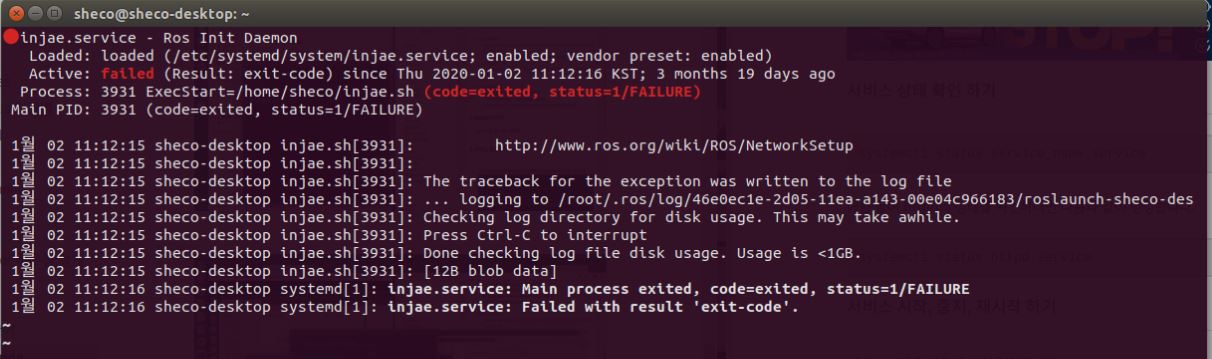
위처럼 서비스가 자동실행되는 과정에서 정상적으로 실행되었는지, 만약 실패했다면 그 이유는 무엇인지 에 대하여 확인할 수 도 있습니다.
결론
부팅 시 원하는 ROS 프로그램을 자동으로 실행하기 위해, 리눅스에서 프로세스들을 관리하는 systemd 를 활용하여 내가 원하는 프로그램의 자동 실행 스크립트를 등록하는 방법을 알아보았습니다.
실제로 Jetson Nano 와 같은 소형 보드에서 ROS 프로그램을 설치하는 경우, 매번 모니터와 키보드를 활용할 수 있는 상황만 존재하는 것 도 아니며 로봇등에 탑재되는 경우 외부에서 실험등을 진행할 때 에는 모니터와 키보드를 아예 사용할 수 없으므로 아.. 부팅시에 내가 작성한 ROS 프로그램을 자동으로 실행시켜야 겠다! 라는 생각이 자연스럽게 드는 것 같습니다.
리눅스의 init 시스템이 왜 기존의 init 을 잘 쓰고 있었는데 systemd로 대체되었을까? 에 대한 의문도 이 글을 작성하면서 알게되었습니다.
많은 도움이 되었길 바랍니다!
읽어주셔서 감사합니다.